AQS原理
Node
等待队列节点类。
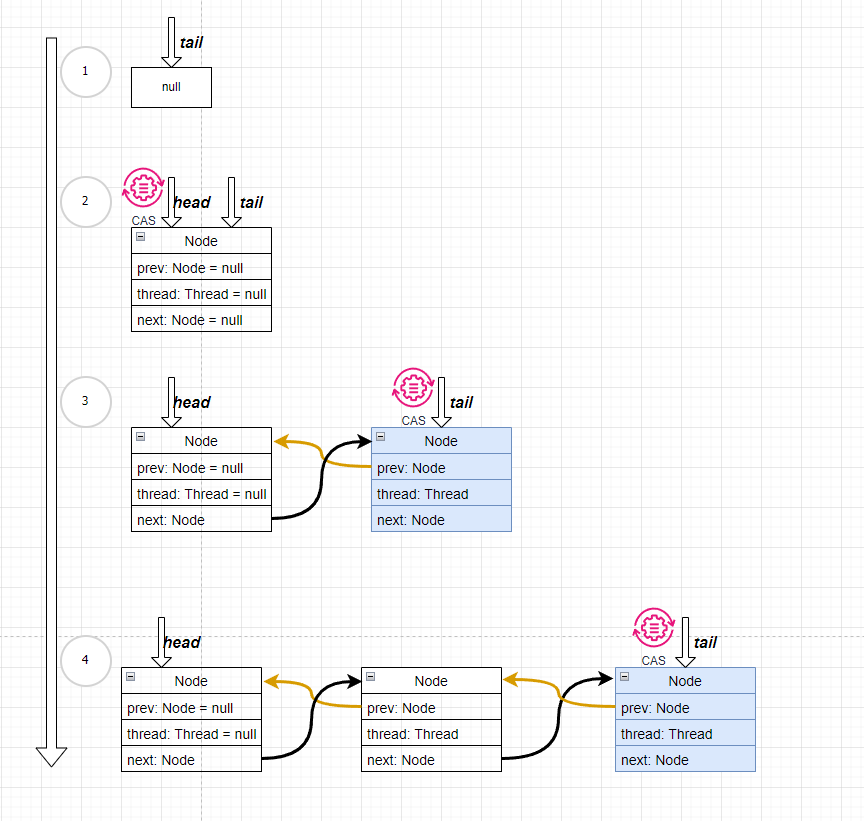
等待队列是 "CLH"(Craig、Landin 和 Hagersten)锁队列的一种变体。CLH 锁通常用于自旋锁。我们将其用于阻塞同步器,但使用了相同的基本策略,即在线程节点的前置节点中保存线程的部分控制信息。每个节点中都有一个 "状态 "字段,用于跟踪线程是否应该阻塞。当一个节点的前节点释放时,就会发出信号。除此之外,队列的每个节点都是一个特定通知式的监视器,监视着一个等待中的线程。状态字段并不控制线程是否被授予锁等。线程可以尝试获取队列中的第一个锁。但是,排在第一位并不能保证成功;它只是给予了竞争的权利。因此,当前被释放的竞争线程可能需要重新等待。
要向 CLH 锁注入队列,可以原子方式将其拼接为新的尾部。要取消queue,只需设置头部字段即可。
插入 CLH 队列只需要对 "尾部 "进行一次原子操作,因此从未入队到入队有一个简单的原子分界点。同样,去队列也只需要更新 "头"。不过,节点需要花费更多的精力来确定谁是它们的后继者,部分原因是要处理由于超时和中断而可能造成的取消。
prev "链接(在最初的 CLH 锁中没有使用)主要用于处理取消。如果一个节点被取消,它的后继节点(通常)会重新链接到未被取消的前置节点。关于自旋锁中类似机制的解释,请参阅 Scott 和 Scherer 的论文 http://www.cs.rochester.edu/u/scott/synchronization/。
我们还使用 "下一个 "链接来实现阻塞机制。每个节点的线程 ID 都保存在自己的节点中,因此前节点会通过遍历下一个链接来确定下一个节点是哪个线程,从而发出唤醒信号。后继节点的确定必须避免与新排队的节点竞争,以设置其前辈节点的 "下一个 "字段。必要时,可以通过在节点的后继者似乎为空时从原子更新的 "尾部 "向后检查来解决这个问题。(或者换一种说法,"下一个链接 "是一种优化,因此我们通常不需要向后扫描)。
取消为基本算法引入了一些保守性。因为我们必须轮询其他节点的取消,所以我们可能会忽略被取消的节点是在我们前面还是后面。为了解决这个问题,我们总是在取消节点时取消后继节点,让它们稳定在一个新的前置节点上,除非我们能找到一个未取消的前置节点来承担这个责任。
CLH 队列需要一个虚拟头节点来启动。但我们不会在构建时创建它们,因为如果从来没有发生过争用,那就白费力气了。相反,我们会在第一次出现争用时构建节点并设置头部和尾部指针。
条件只需链接简单(非并发)链接队列中的节点,因为它们只有在被独家持有时才会被访问。等待时,节点被插入条件队列。发出信号时,节点被转移到主队列。状态字段的特殊值用于标记节点在哪个队列上。
addWaiter